3. QGroundControl SW 설치
기본적인 픽스호크와 DJI450을 HW 연결 구성을 끝낸후 GCS를 이용하여 칼리브레이션을 모두 마친후 조종기를 이용하여 단순 비행까지의 과정
● DJI F450기반 쿼드콥터(2) - 조립정보 및 조립순서
● DJI F450기반 쿼드콥터(3) - Pixhawk 드론 DJI F450 연결
● DJI F450기반 쿼드콥터(4) - GCS 환경설정 및 Flying
1. QGroundControl GCS 설치 및 설정
qgroundcontrol.com/downloads/ 에서 다운로드후 노트북에 설치(Window용, MAC용)
사이트 : https://legacy.gitbook.com/book/donlakeflyer/qgroundcontrol-user-guide/details/kr
노트북과 Pixhawk를 연결(USB to TTL)하여 기본적인 셋팅과 인식에 문제가 없는지 점검합니다.
※ 각종 GCS(Ground Control Stations)에 대한 설명 http://ardupilot.org
셋팅 참고사이트 : https://docs.px4.io/en/config/ or cafe.naver.com/firstbig/713
1) 프로그램설치
실행 --> 오른쪽 위에 "Waiting for Vehicle Connection" 나오고 Telemetry를 연결하지말 고 --> USB Connector로 Pixhawk 연결(배터리 연결안함)

2) 펌웨어 업데이트
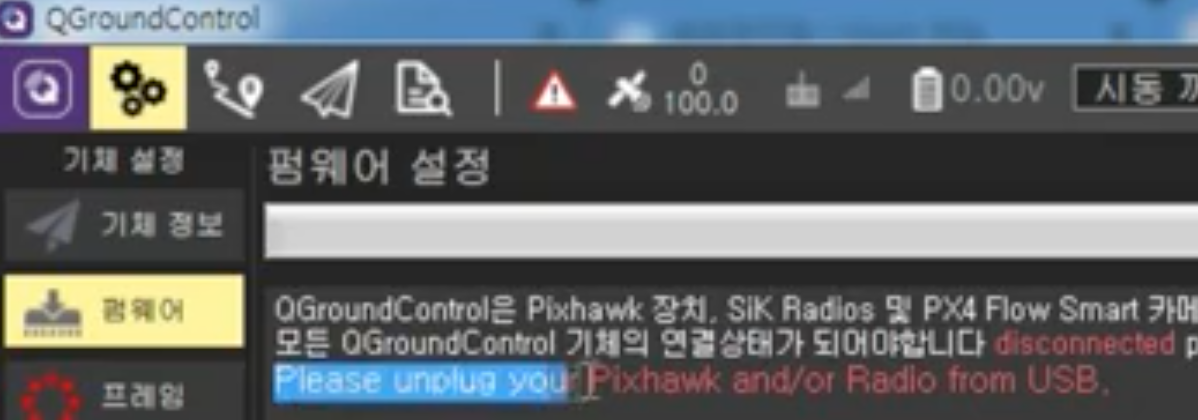
좌측위 기어박스 모양 클릭
2번째 메뉴 펌웨어 클릭
그리고 USB를 제거 하면 아래의 화면이 나옴

USB를 다시 연결한다

PX4 Pro v1.?? Stable Release가 선택된 상태에서 확인 버튼을 클릭

펌웨어 업그레이드 화면이 아노고 하단에 업그레이드 완료라는 메세지가 나옴
조금 기다림
드론에서 삑,삑,삑,삑 규칙적인 소리가 나오다가 띠리링 하는 소리가 나오면 정상적으로 업데이트가 완료된것임

정상설치되면 좌측 메인 메뉴들이 나오고 오른쪽 윗편에도 PX4로 변경된 사항을 확인할 수 있음
3) 프레임선택

QuadCopter선택
Generic QuadCopter선택
Generic Quadcopter 선택 --> 오른쪽 위 "적용하고 재시작"
--> 잠시 기다리면 재부팅(픽스호크에서 소리가 남)
4) 전원설정
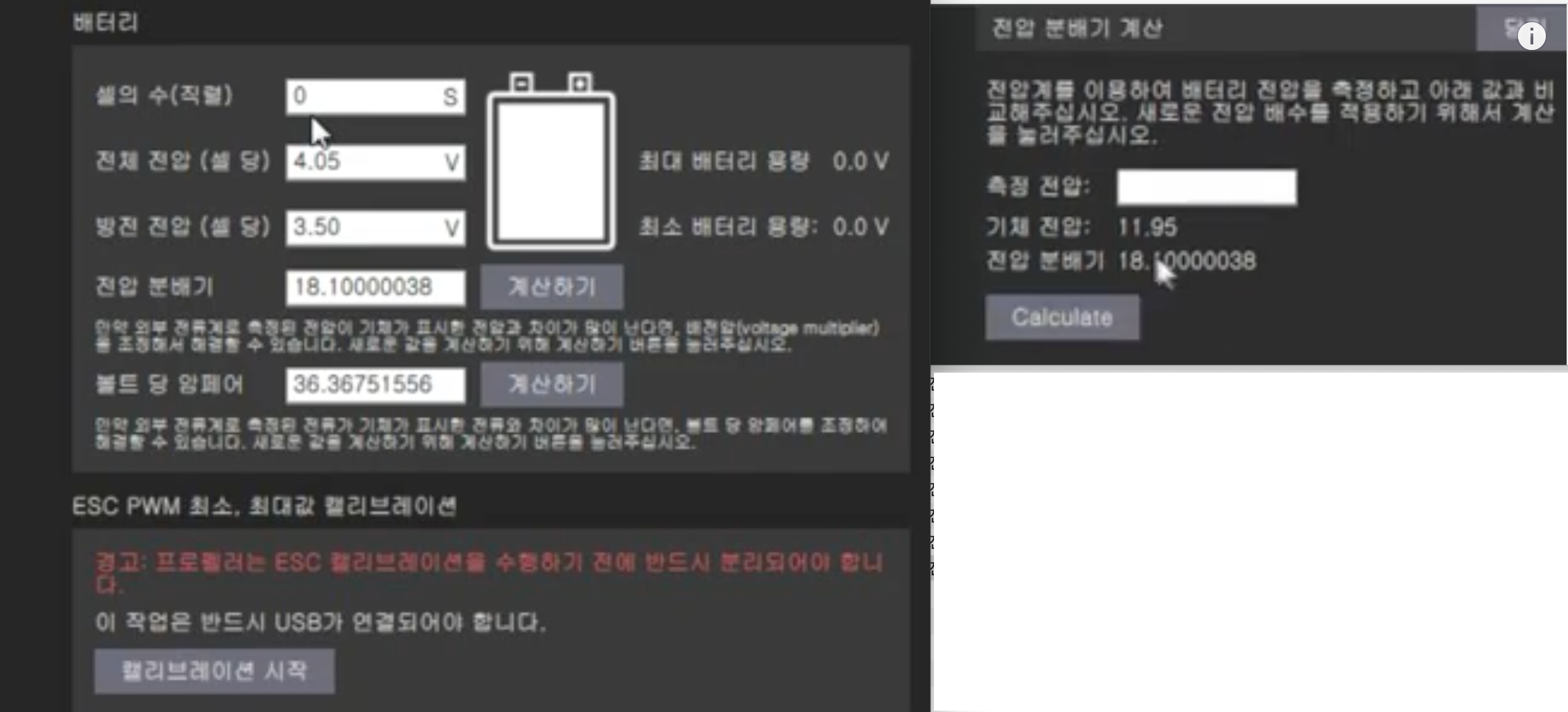
기체에 배터리를 연결한다
셀의 수 : 3셀 or 4셀 (배터리 스펙 확인)
11.1v 배터리는 보통 3셀
전체 전압 : 4.2V (11.1v 배터리 기준)
방전 전압 : 3.3V (안정적 기준)
계산하기 클릭 --> 오른편 분배기 계산
기체전압 : 11.95인데, 실제 배터리를 측정 예를 들어 12.05 이렇게 나온다면
측정전압 : 12.05 를 입력 --> Calculate클릭 (실제 기체전압 값이 바뀜)

칼리브레이션 시작 클릭
--> 배터리 분리후 확인 버튼
--> 프로펠러 분리 됐는지 확인
--> 배터리 연결 --> 확인버튼
--> 칼리브레이션 수행 --> 확인
--> 확인 --> 배터리 전원분리
USB 연결대신 Telemetry를 이용하여 연결
5) 센서 칼리브레이션

메뉴중 센서 클릭
--> 지자기 센서
--> ROTATION_NONE (기체방향 정방향 위치)
--> 확인
--> 아래의 모양대로 움직이면 됨
이후 자이로스코프센서
가속도 센서도
동일하게 수행
4개의 센서가 모두 초록색으로 되어 있으면 정상적으로 설정된것임
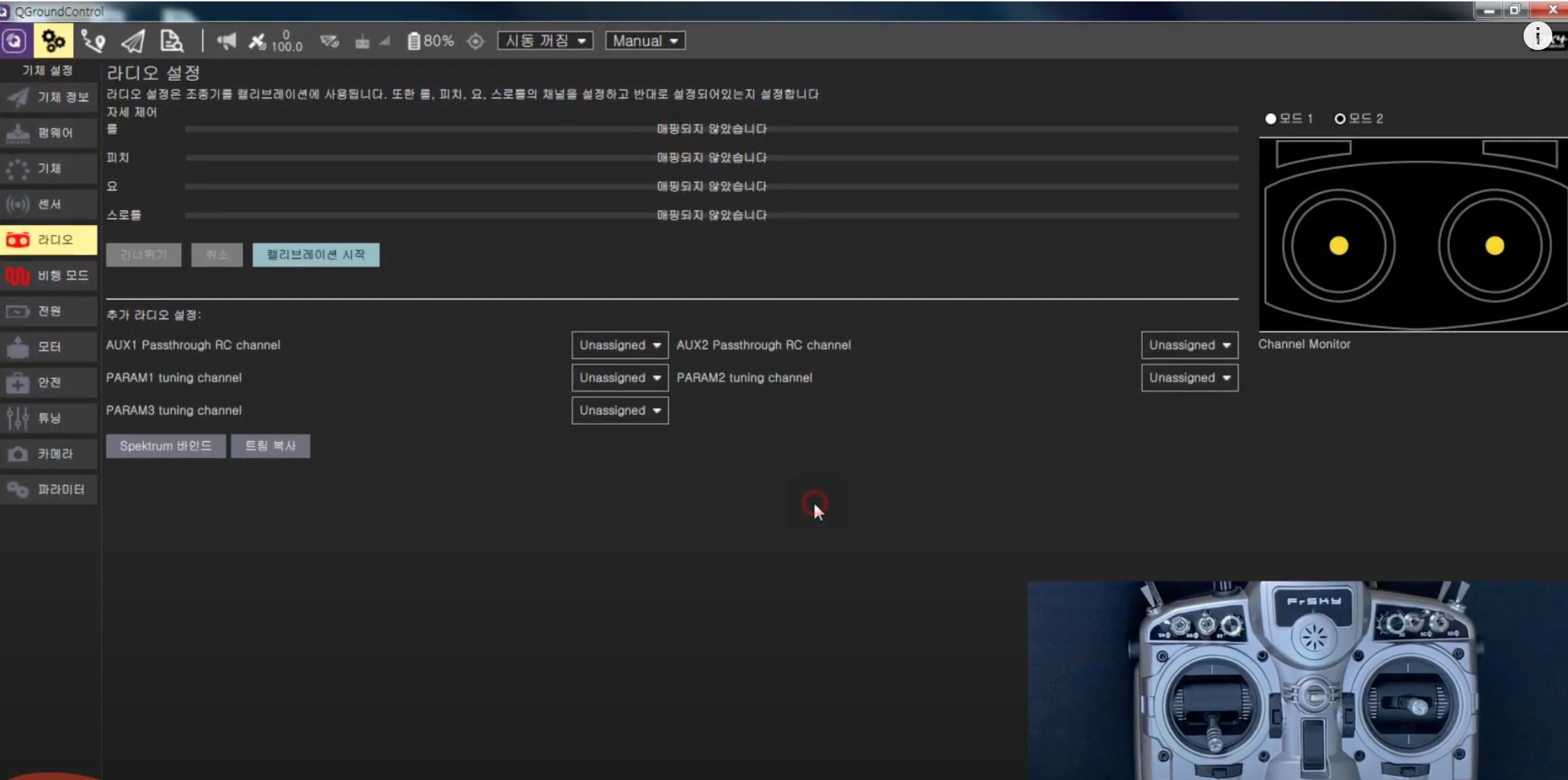
6) Radio 설정
현재 리시버와 트랜스미터를 연결한 상황에서 트랜스미터(조종기)를 캘리브레이션해주는 단계
조종기 : 모드1(좌측 스틱이 가운데 고정된 모드), 모드2(우측 스틱이 가운데 고정된 모드) 아래 그림은 모드2(조정기 우측 스틱 가운데고정)
비행모드 스위치 할당: 조종기 좌측 위, 앞쪽 2개중 앞에 있는 스위치를 할당 (조종기 마다 다를 수 있다, 주로 3가지 모드 변환시 사용)
조종기 설정 > mix 항목 선택 > 1~4번은 이미 할당되어 있고 > 추가로 5번을 선택한다 > 이름설정(옵션) > 소스선택후 해당 스위치를 아래위로 움직이면 화면에서 변경된 사항을 확인할 수 있다 > 멀티플렉스 선택 > Replace선택 > 빠져나가면 설정완료
칼리브레이션 시작 > 화면에 나오는데로 따라하면 됨
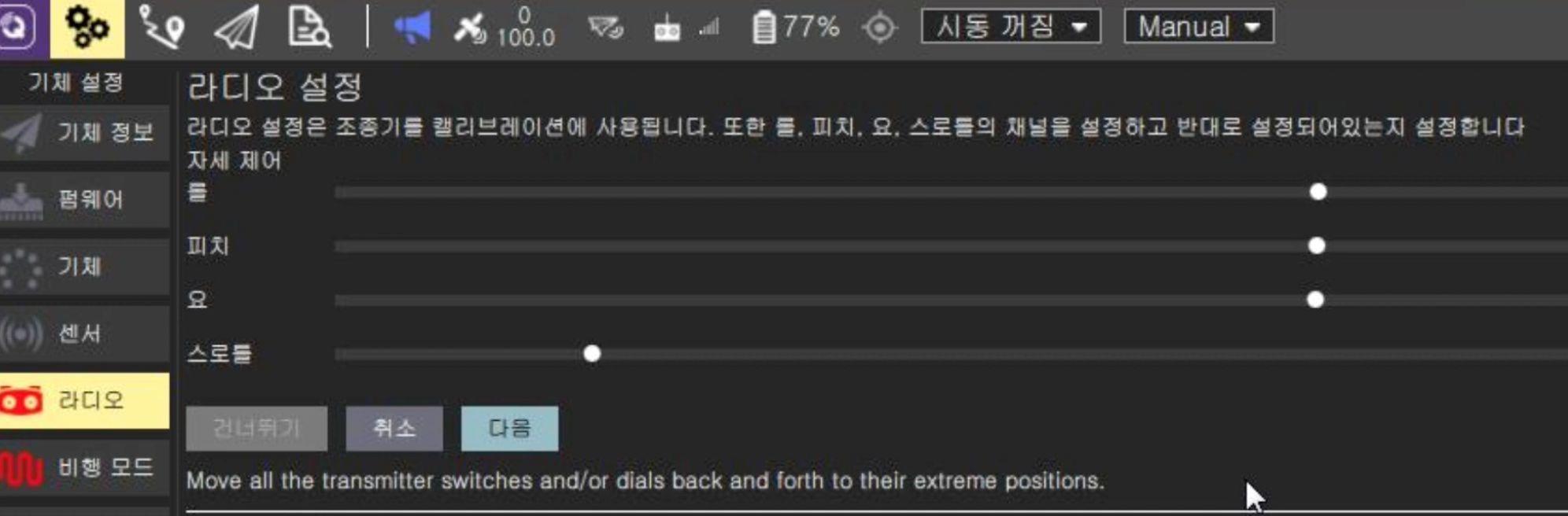
맨 마지막 단계에서 모든 스위치를 움직이라는 메세지가 나오면 스위치, 스틱등을 자유자재로 모두 움직인다

모드 완료됐을 시 조종기에서 채널을 선택하는 스위치를 토글하면 화면 오른편 하단 Channel Monitor에 반응을 볼 수 있다. 반응이 없다면 셋팅을 다시 확인해야한다.
채널을 여기서는 "5"번을 선택하고, 미리설정된 스위치를 변경하면 비행 모드 1~6번에 노란색으로 표시가 나타난 모드가 보인다.
여기서는 1,4,6번이 동작하고 1번:Manual, 4번:Stabilized, 6번:Hold(GPS모드)

7) 테스트 모터 동작
1) 프로펠러를 제거하고 순수하게 모터로만 동작테스트, 프로펠러 없는 상태
2) 조종기 아밍 (이때 드론의 safety button을 눌러야 가능한 경우가 있다)
--> 아밍때 모터가 동작하면 정상
 |
 |
8) 프로펠러 동작 테스트
1) 두 사람이 필요하다
2) 한 사람은 드론의 하단을 붙잡고 프로펠러에 닿지 않도록 들어준다. 하늘방향으로
3) 다른 한사람이 조종기로 아밍을 한다. --> 프로펠러가 동작할 때 드론을 들고 있는 사람은 프로펠러에 닿거나 다치치 않도록 유의한다.
4) 조정기로 전, 후, 좌, 우, 회전, 스로틀링을 하면서 드론을 붙잡고 있는 사람이 느끼기에 조정기로 전후좌우등 할때 드론이 해당 방향으로 움직이는 힘을 느낄 수 있다. 크게 문제가 없다면 이상무
9)실제 비행
1) 아밍
2) 스로틀을 살짝씩 위로 올려준다.
3) 비행성공
Origin Link : youtu.be/0JOwODzGNoQ
QGroundControl 셋팅방법 영상
※ 시동걸기 유의사항
- 조종기의 전원을 넣는다.
- 기체의 LiPo 배터리를 연결한다. 자이로가 초기화되면서 적색/청색 불이 깜박입니다. 이때 기체를 움직이면 안됩니다.
- Pixhawk가 시동전 점검(http://ardupilot.org/copter/docs/prearm_safety_check.html)을 실시합니다. 문제가 발생할 경우 LED가 노란색으로 점멸하게 됩니다. 이때는 GCS를 연결하여 점검해야 합니다.
- 비행모드는 Stabilize/Acro/AltHold/Loiter로 설정되어 있어야 합니다. 다른 모드에서는 시동이 걸리지 않습니다.
- Pixhawk의 안전 스위치를 1초 정도 눌러주면 빨간색이 고정됩니다.
- GPS와 관련있는 조종(Loiter, RTL, Auto 등)을 사용하려면 GPS를 고정(LED가 초록색으로 깜박임??)시키고 나서, 30초 정도 후에 시동을 걸어야 합니다. GPS 위치를 안정화시키기 위한 목적입니다.
- throttle 최하단, rudder 최우측으로 한 후, 5초정도 지나면 시동(Arming)이 걸립니다. (이 시간동안 자이로와 기압계를 재초기화시킵니다.) 참고로 15초 이상 스틱을 이 상태로 고정하고 있으면 Auto Trim 모드로 들어가게 되므로 주의하세요.
- 시동이 걸리면 LED가 빨강색으로 깜박이고 프롭이 돌아갑니다. 시동이 걸리지 않을 경우 시동전 점검에서 문제가 발생한 것이므로, 먼저 조치를 취한 후 다시 시도해야 합니다.
- 이제 Throttle을 올리면 기체를 이륙시킬 수 있습니다.
- (유투브 참조 : https://youtu.be/KiNOgcpcXjg)
※ 처음 시동 시 테스트
pixhawk와 qgroundcontrol로 px4 stack을 설치 및 환경이 기본 셋팅되면 바로 조종기를 통하여 쿼드콥터를 비행시킬 수 있습니다. 다음 단계로 넘어가기 위해서는 살짝 조종기술에 대해서 간략하게 설명하고자 합니다. (더 많은 정보는 인터넷에서 찾아보고 본인이 이해하기 쉬운 설명을 보시면 됩니다.)
- 우선은 Throttle을 천천히 밀어올려서 살짝만 띄웁니다.
- 만약 이 상태에서 기체가 흔들린다던지 이상 징후가 발생되면 즉시 착륙시킵니다. 기체를 손으로 단단히 잡고(프롭에 닿지 않도록 유지하면서) Throttle을 천천히 밀어보면서 기체가 어떻게 반응하는지 살피고, 우측 스틱을 전후좌우로 움직이면 기체가 그 방향으로 기울어지는지 확인해 봅니다. 만약 다른 방향으로 움직인다면 모터를 잘못 결합했거나, 프롭 방향이 바뀌는 등의 문제가 있으니 확인합니다. (모터 및 ESC 테스트 확인)
- Pitch와 Roll이 반대로 움직일 때는 RC 송신기에서 해당 채널을 Reverse 시켜줍니다.
- 약간 띄우면 Yaw가 약간 돌아가는데 30도 이상 돌아가면 안됩니다. 좀 더 날리면 스스로 방향을 잡습니다. (기체가 기우뚱 거리면 안됩니다. 만약 그렇다면 프롭이나 모터에 이상이 있다는 것입니다.)
- 이륙시키면 (바람이 없다면) 제자리에 그냥 떠 있어야 합니다. 전후좌우로 흐름이 있더라도 Trim으로 조종하지 마십시오. 평평하지 않은 곳에서 이륙시키면 이런 현상이 발생하고, 프레임이 잘못되었을 (모터 하나만 기울어짐) 가능성이 있습니다.
- 그래도 문제가 있다면 troubleshooting guide(http://ardupilot.org/copter/docs/troubleshooting.html)를 읽어보시기 바랍니다.
- 이 정도가 문제가 없다면 이제 Loiter, AltHold 등을 사용할 수 있습니다.
※ 첫 비행을 위한 조언
- 바람이 없는 환경에서 날릴 것. (바람이 있으면 Auto Trim이 불가능함)
- 수신기에 있는 Trim은 사용하지 말것
- 1 미터 정도만 띄우면 Ground Effect는 없다고 봐도 됨.
- Auto Trim을 시도하기 전에 미리 충분히 연습해서 송신기 스틱만으로 기체를 한 지점에 고정시킬 수 있는 위치를 찾아둘 것.
- Simple모드로 시작하지 말고 Stabilize 모드로 시작할 것.
- Home 위치(RTL에서 돌아오는 위치)는 처음 시동을 거는 지점임.
2. Mission Planner GCS 설치 및 환경설정
1) 프로그램 설치 및 실행
https://firmware.ardupilot.org/Tools/MissionPlanner/ 에서 최신파일을 다운받아서 노트북/데탑에 설치한다.

2) 펌웨어 설치
픽스호크 옆면 usb 연결단자와 노트북 USB 포트와 케이블로 연결윈도후 오른쪽 하단에 새로운 하드웨어 발견, 설치중이라는 메세지를 확인할 수 있습니다.
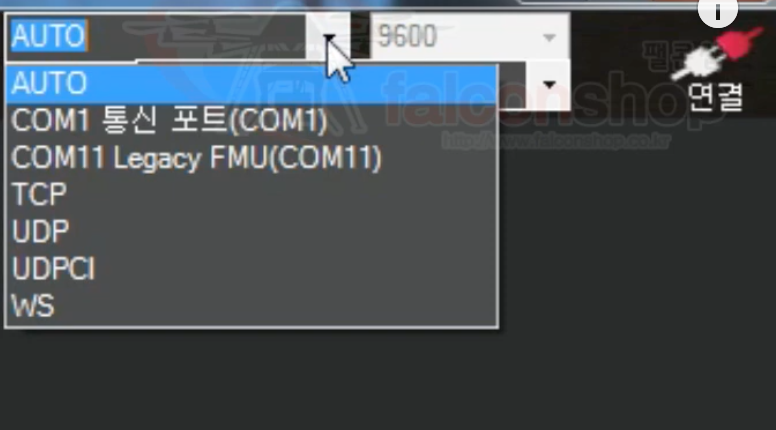
오른쪽 상단에 포트 설정, COM1이외에 다른 포트가 보일것이고, 해당 포트를 선택한다
통신속도는 115200
오른쪽 "연결"은 클릭하지 않는다
*좌측 "펌웨어 설치 Legacy" 선택 -> ArduCopter 선택 -> 팝업 "업로드 ..." > Yes -> 팝업 "보드 분리 ..." > 픽스호크에서 usb를 분리후 "OK" 클릭한 다음 30초내로 다시 usb연결 -> 팝업 "Cube Black" >NO -> 팝업 " ChibiOS" > NO -> 기존 펌웨어 삭제후, 다시 업로드 ->
업로드가 완료되면 픽스호크에서 띠리링띠리링....하면서 소리가 나오면 정상 재부팅한것임

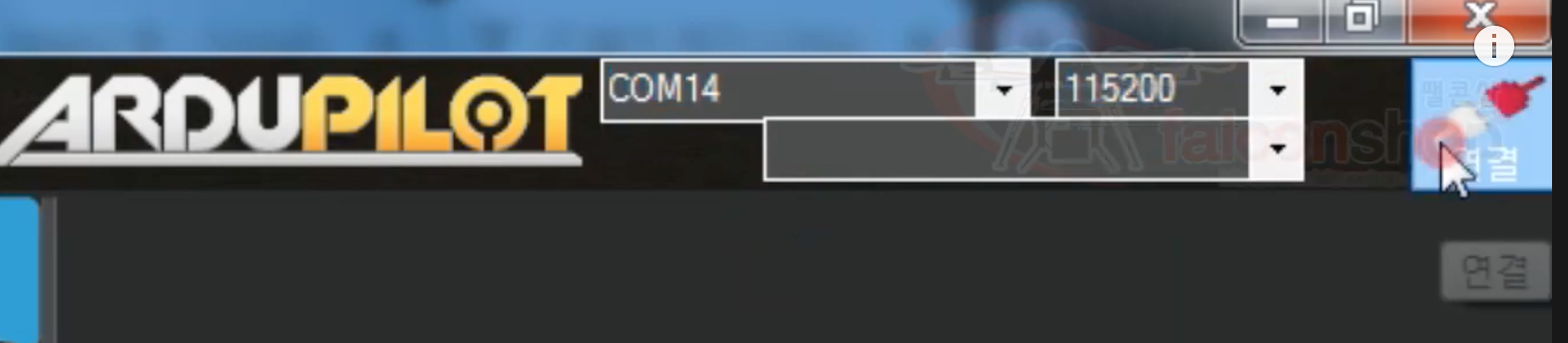
재부팅후 오른쪽 윗편 컴포트가 변경되어 있을것임 해당 포트 선택, 통신속도 선택 , 연결 클릭

연결이 정상적으로 됐다고 하면, 좌측 상단 "비행 데이터"를 클릭하고 기체를 전후 좌우로 움직이면 화면에서 움직임이 나타나고 하단의 수치가 변화되는게 보이면 정상임
텔레메트리가 있으면 다음 설정부터는 텔레메트리를 연결한다
새로운 하드웨어 설치가 뜨고, 우측상단 컴포트 선택, 통신속도를 57600을 선택한다.
배터리를 드론 본체에 연결후에 부팅이 완료되면 그 때서 연결버튼을 클릭한다.
3) 프레임 유형선택
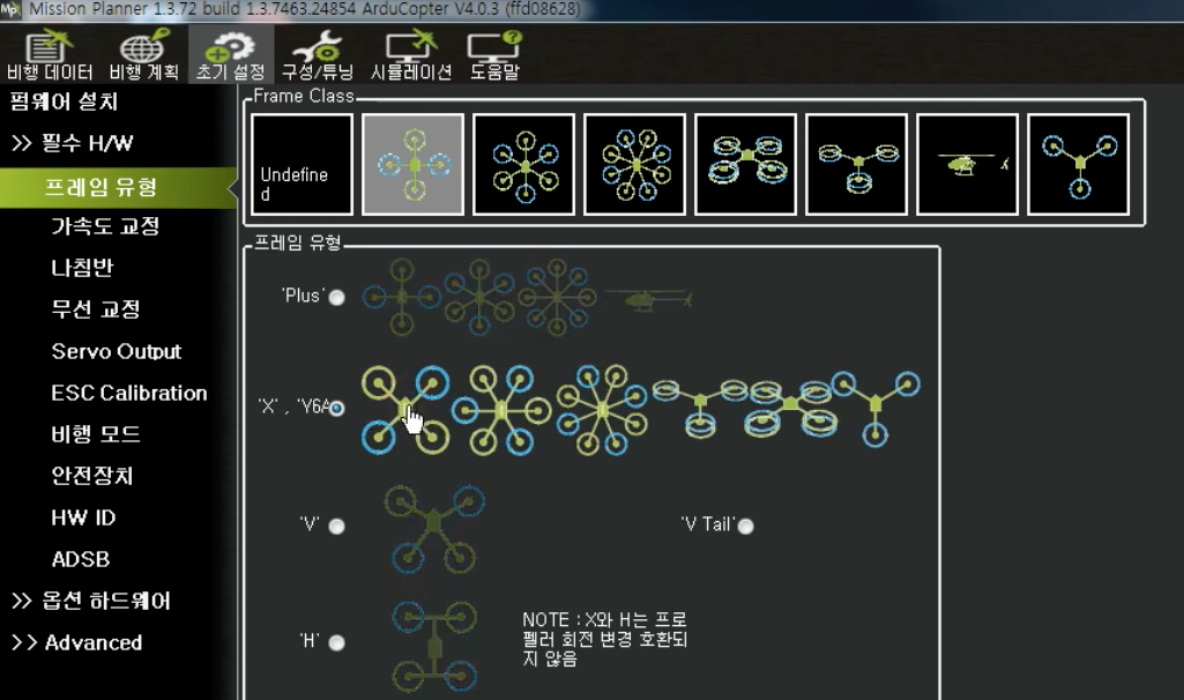
초기설정 -> 프레임유형 -> 쿼드콥터 설정 -> 하단의 동일한 모양 선택
4) 무선교정

조종기의 스틱을 움직였을 때 화면의 그래프가 움직이면 정상.
※ 움직이지 많으면 수신기와 조종기 바인딩을 체크해보시기 바랍니다.
#1. Alie(Roll) : 비고정 스틱 / 좌우
#2. Elevator(Pitch) : 고정 스틱 / 상하 (반대로 움직여야함)
--> 조종기 설정중 Reverse 설정 하면 됨
#3. Throttle : 비고정 스틱 / 상하
#4. Rud(Yaw) : 고정 / 좌우
스위치 할당 : 조종기 설정 > mix 항목 선택 > 1~4번은 이미 할당되어 있고 > 추가로 5번을 선택한다 > 이름설정(옵션) > 소스선택후 해당 스위치를 아래위로 움직이면 화면에서 변경된 사항을 확인할 수 있다 > 멀티플렉스 선택 > Replace선택 > 빠져나가면 설정완료
(조정기 좌측 앞단 스위치 선택)
무선보정 : 스틱을 모두 가운데 위치 -> 무선보정 클릭 -> 좌우 스틱을 360 회전(또는 4각 꼭지점)하면서 최대로 움직이면 4가지 채널에 붉은 선으로 최대,최소 수치라인을 그림. ->#5에 할당한 스위치도 움직인다.

스위치 가운데 위치, 스틱 모두 가운데 위치하고 "완료" 클릭시 팝업 "스로틀을 아래로 내림" -> OK -> 설정값 나오고 OK 클릭하면 완료
5) 변속기 캘리브레이션(esc calibration)
조종기 쓰로틀 스틱 제일 위로 이동 -> 드론 배터리 연결 -> 삑삑 소리...LED(빨,파,초 서로 변동) -> 배터리 제거 -> 스틱 맨위 상단 유지후 -> 배터리 연결 -> 안전 스위치 눌러줌(사운드) 삐삐(최상점인식) -> 쓰로틀 스틱 제일 하단으로 내림 -> 띠리링(사운드) 최하점 인식 -> 띠띠띠 띠띠(사운드) -> 완료
정상이면 그 상태에서 쓰로틀을 올리면 모터가 동작한다. (모터가 동작하지 않으면 앞선 변속기 캘리브레이션을 다시 수행하면 된다.)
쓰로틀 스틱이 제일 하단에 유지하고 배터리를 분리한다 -> 배터리를 다시 연결 -> 띠리링링 -> 안전스위치 눌러줌 -> 정상완료
6) 가속도 교정

수평으로 드론을 고정하고 (수평계 있음 더 좋음)
레벨보정

1) 드론을 좌측으로 기울기
2) 우측으로 기울기
3) 앞으로 바닥으로
4) 앞을 위로
5) 뒤집기
완료
*되도록이면 드론을 앞으로 위치시키고 할것
7) 나침판 교정
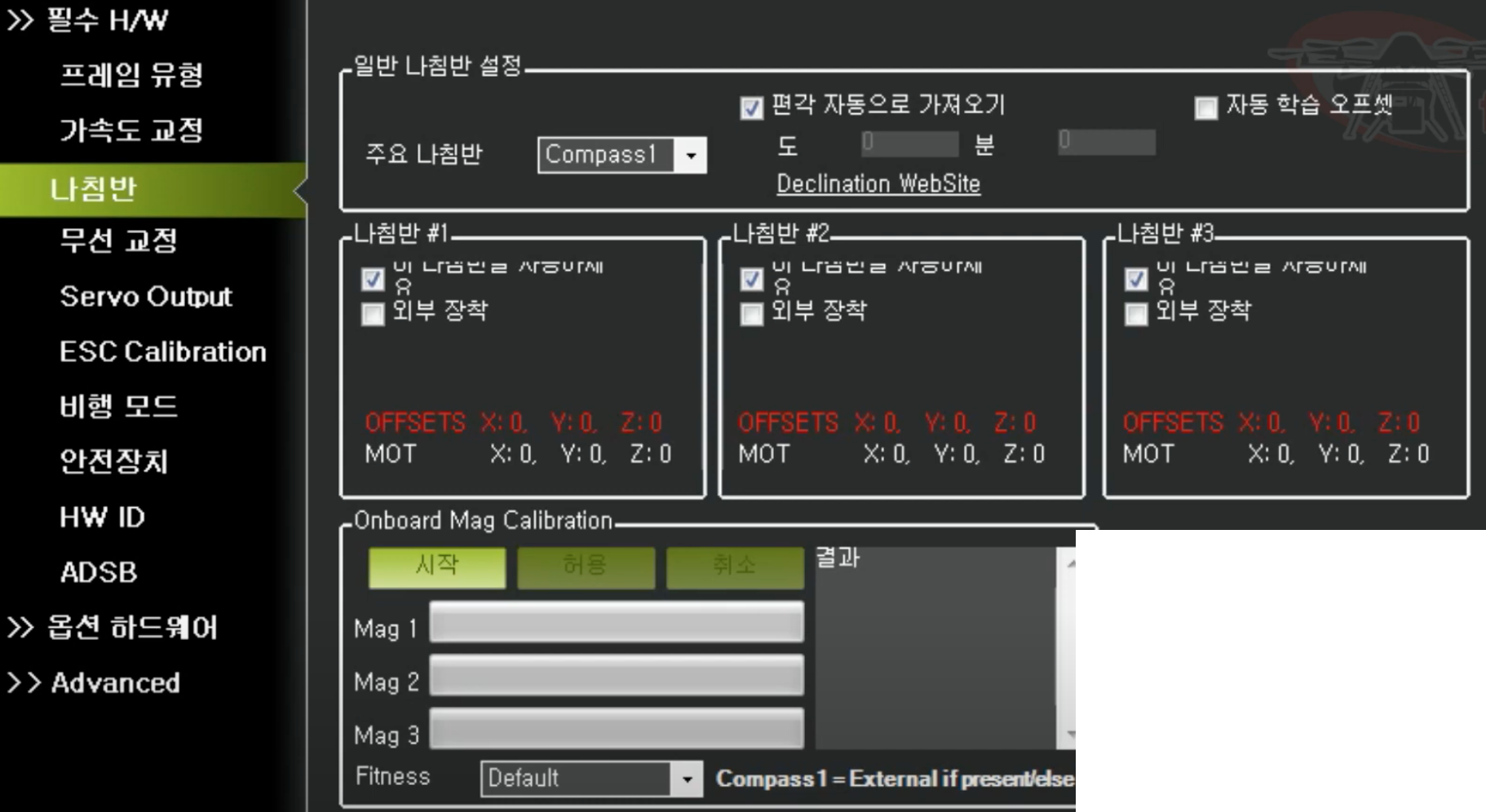
픽스호크 내부와 외부 GPS 2개가 있다.
주로 내장센서보다는 외부 GPS를 사용한다.
나침판 #1, #2, #3에 이 나침판을 사용하세요에 체크되어 있는 부분을 제거함(1개만 사용)

나침판#1 "외부장착" 선택
None으로 둔다
※ 외부 GPS는 드론 앞쪽을 바라보도록 셋팅하는게 제일 좋음.
Onboard Mag Calibration 시작 버튼을 누르고 드론을 전후,좌우,360,뒤집어서 원형구 형태의 모습으로 드론을 움직이면 Mag 1이 정상적으로 그래프나 나타나고 완료됨.
8) 비행모드 설정

채널#5로 설정하여 모드1 : Stabilize, 모드4:AltHold(고도고정), 모드6:Loiter(GPS고정모드) -> 비행데이터에서 오른편 하단에 Stabilize가 보임
조정기의 스위치를 바꾸면 화면상에서 변경한 모드가 보여짐(정상)
9) 배터리 알림창

모니터 : Analog voltage and Current 선택 -> 변수값들 로딩 -> 완료
센서 : 0:Other 선택
APM버전 : The Cube or Pixhawk 선택
다른 페이지를 갖다가 다시 오면 저장됨 -> 픽스호크 재부팅
부팅후 배터리 전압 -> 리포알람으로 체크 -> 수치확인(ex. 11.9) -> 1.측정배터리전압값 : 11.9로 수정후 엔터 -> 비행데이터 하단에 변경된 수치로 나옴
10) 모터시험
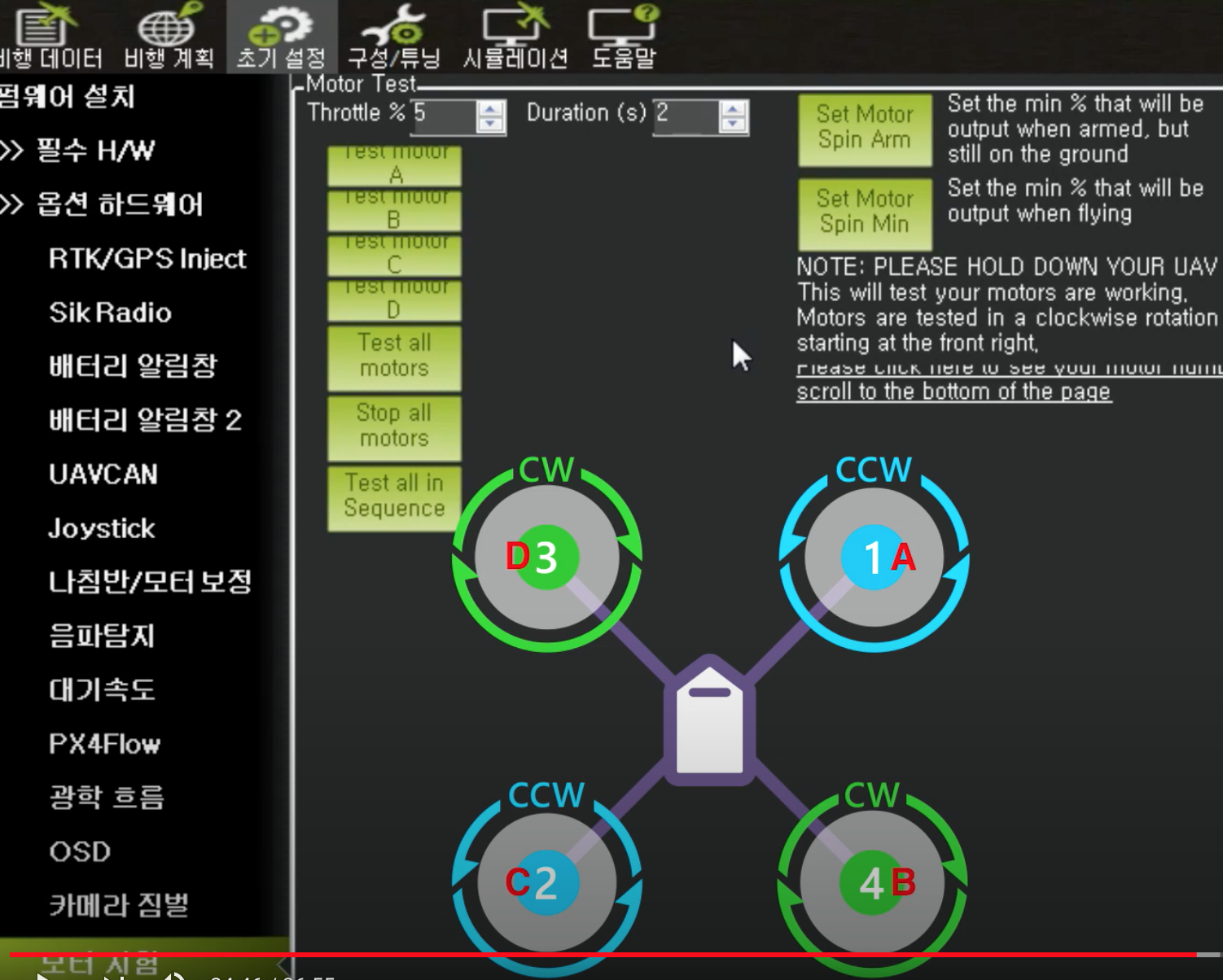
모터가 각자 제대로된 방향으로 동작되는지 테스트
순서대로 클릭한다
Origin Link : youtu.be/2z6hNdNp8i0
MissionPlanner 셋팅방법 영상
※ 실제 filying 영상
'Tech Story > QuadCopter' 카테고리의 다른 글
| DJI F450기반 쿼드콥터(4) - GCS 환경설정 및 Flying (13) | 2020.12.19 |
|---|---|
| DJI F450기반 쿼드콥터(3) - Pixhawk 드론 DJI F450 연결 (3) | 2020.12.19 |
| DJI F450기반 쿼드콥터(2) - 조립정보 및 조립순서 (0) | 2018.04.04 |
| DJI F450기반 쿼드콥터(1) - 부품 설명 (2) | 2018.04.04 |
| 드론 이야기 (0) | 2018.04.04 |